|
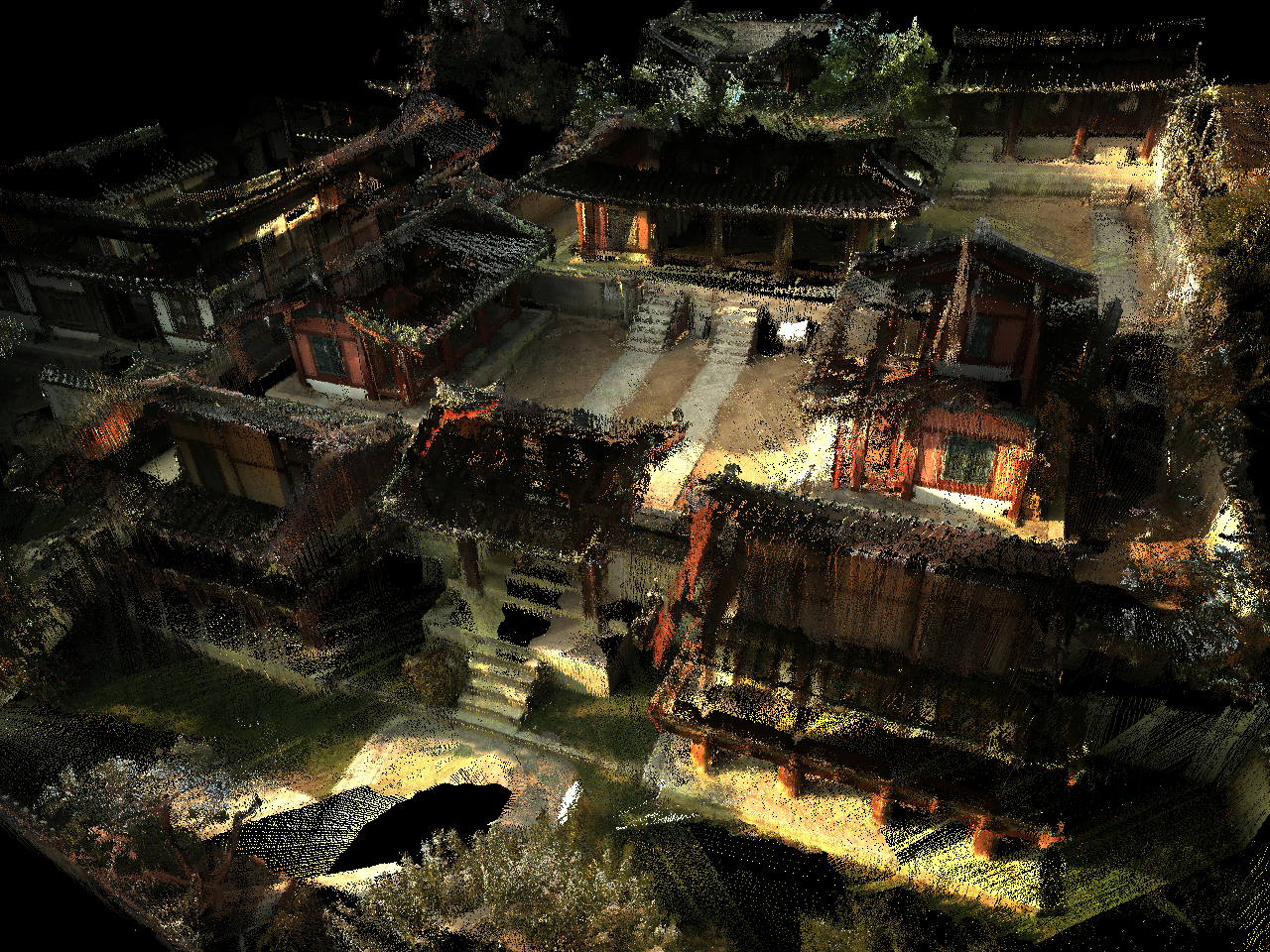
The main objective of this research is “megacity modeling”. Reconstructing 3D structure is one of the fundamental issues of computer vision community. Several novel methods showed reasonable results, but the target of most researches was the object reconstruction in small-scale environment. Recently, the main issue of the 3D reconstruction has been changed into large-scale, such as huge buildings, ancient ruins, and cities.
This research is important in the historical point of view. Reconstructing the present appearance of a megacity is helpful for recording the change of the city on the time domain. Additionally, the 3D model of a megacity can be utilized in many applications. The manufacturers of car navigation system try to provide a realistic 3D model to help the drivers. This kind of system is not available yet, but the result of the megacity modeling will provide the precise information of the roads and structures nearby. The virtual sightseeing through the internet becomes more realistic using the result. This enhances the convenience and welfare of future society so that the busy or disabled people can travel the world.
 
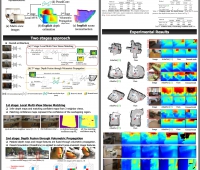
In this research, we reconstruct 3D structure of the megacities using various sensors such as cameras, laser scanners and GPS. We collect information by capturing data on the ground and in the sky. We find the correspondences among the captured data and reconstruct 3D structure. Non-static objects such as pedestrians and cars must be removed.
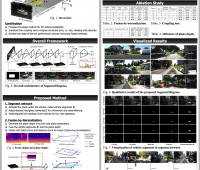
The final result of this project is the 3D model of megacities such as Seoul or Daejeon, the sensor system to collect data, and the method of reconstruction using the data. We present the method of data collection using ground and aerial vehicles. We present the sensor system attached to the vehicles, and the details of data collection process, e.g. vehicle path, frame rate, etc. With enough sensor data, we develop the method of sampling data, localizing the system, and reconstructing static scenes with few human interactions. And we also present the method for efficient visualization such as data compression, texture mapping, etc.
The main application of the final result is the preservation of current scenes. The scenery in present days is a historically important material after several decades. We can recognize which part is changed as time passes at a glance. The result provides the information which typical photos cannot do, and is very useful for reconstructing the old scenes which is required for movies. Not only the past result, but also the present result can be used in various applications. We can pass through the reconstructed result and see any parts in any directions. Car navigation and virtual sightseeing would be good applications of the result.
Publications
Capturing Village-level Heritages with a Hand-held Camera-Laser Fusion Sensor
Yunsu Bok , Dong-Geol Choi , Yekeun Jeong , In So Kweon
IEEE Workshop on eHeritage and Digital Art Preservation, In conjunction with ICCV 2009 , October 2009
|




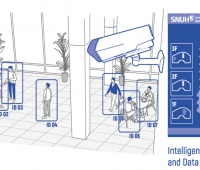









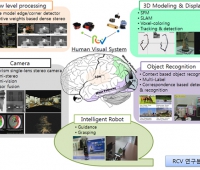
 Visual Perception for Autonomous Driving in Day and Night
Visual Perception for Autonomous Driving in Day and Night
 Intelligent Robot Vision System Research Center (Localization...
Intelligent Robot Vision System Research Center (Localization...