|
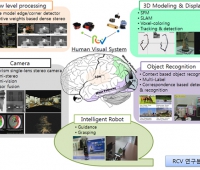
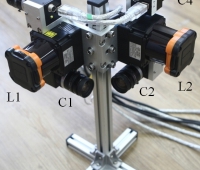
Developing Detection and Tracking Algorithm Working on a Mobile Robot.
Our goal is to develop algorithms that we can apply on mobile robots, but currently we focus on algorithms for static camera in order to form our fundamental structure.
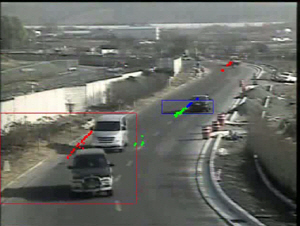
Detection
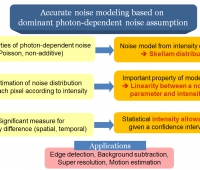
When detecting object, we need to consider noises due to environmental changes, illumination changes, and many other causes.
 
Detection in dynamic environment
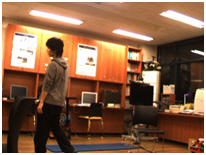 
Detection when there is illumination change
Current techniques for background subtraction have limitations as you can see from the images above. There are many false alarms caused by noises such as tree waving, color similarities between background and foreground, etc. Besides, pixel intensities change through the whole area when illumination changes and it is hard to decide if the change is from the light or from the foreground movement. To solve such problems, we are trying to model noises precisely so that we can correctly figure out where those false alarms coming from. Moreover, we are developing detection algorithm which is also robust to weather conditions like rain, snow, or wind.
 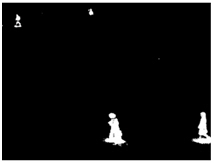
Detecting the objects at a long distance
In addition to that, we are also considering about objects at a long distance.
Tracking
Tracking algorithm need to track objects even if the object is blocked or is intersecting with another object. Although cameras would be static in current stage, we are developing algorithm that is applicable when the camera unit can do panning and tilting so that we can control the camera to make the object located at the center of the image.

Object tracking when there is an occlusion.

|
Tracking many objects when there are intersections among the objects.
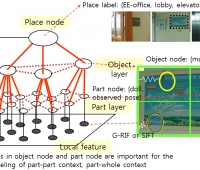
In order to succeed the tracking algorithm in such environment and limitations, we need to use not only color or texture information but also motion models of the objects. Moreover, we need to extract features from the objects and store them. Thus, we can robustly estimate where the object would be using the motion model and we can also verify and adjust the results using the specific descriptions.
|
|