|
Ⅰ. Title
Development of robust vision technology for object recognition and shape modeling of intelligent robots
Ⅱ. Objectives
This research aims the development of robust and stable robot vision technology for object recognition and its real-time implementation. Furthermore, the robustness and usefulness of the developed technology is demonstrated by integrating the developed technologies to a practical mobile robot, which works under a general environment.
Ⅲ. Contents and Range
At the first step, we study some features which are robust and invariant to the environmental change and an object recognition methodology based on these feature. At the next step, a robust robot recognition technology which can be used for uncontrolled working spaces and a high-speed modular model are developed based on the vision technologies.
1) Robust and functional object recognition technology of intelligent robots
: Learning-based 3D object recognition
: DB generating mechanism for unlearned objects
2) Space recognition using real-time omnidirectional 3D sensor
: Automatic SLAM technology
: SLAM based on the integration of various information in a scene
3) High-speed modular model of robot vision technology
: Hardware-level implementation of low-level processing
: Integration of high-level HW/SW systems
4) Unified framework of space/object recognition
: Analysis of the connection between space and object recognition
: Development of the unified framework
After the developed technologies are applied to a mobile robot, we examine the robustness of the technologies to various illumination and geometrical/material changes during the second step of the project.
Ⅳ. Results
The research achievements are classified into several groups:
1) Modeling of the environmental change
2) Robust feature based on the human visual system
3) Space/object recognition
4) SLAM and autonomous navigation of a mobile robot
5) Improvement of robustness through noise modeling and error compensation
6) High-speed vision
7) Integrated intelligent mobile robot platform.
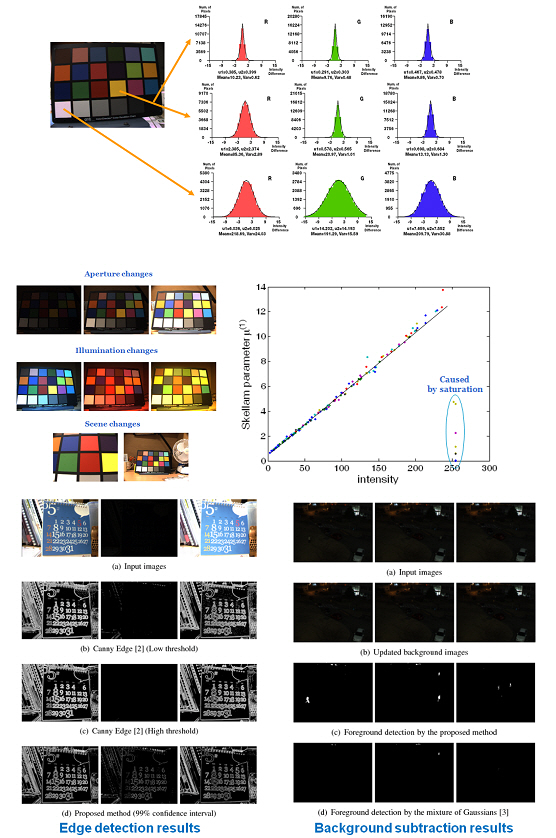
In 1) modeling of the environmental change, AIL(Automated Imaging Lab.) is constructed and technologies for chromaticity estimation and camera calibration technique are developed.
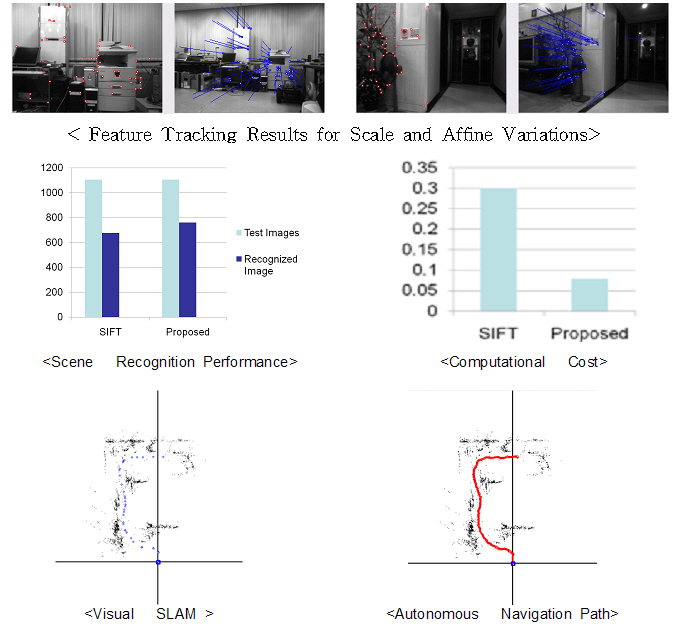
In 2) robust feature based on the human visual system, RIF(Robust Invariant Feature) is developed based on feature signature tracking and is generalized into GRIF(Generalized Robust Invariant Feature). In addition, technologies for visual correspondence search are developed by utilizing Gestalt principals of human visual system.
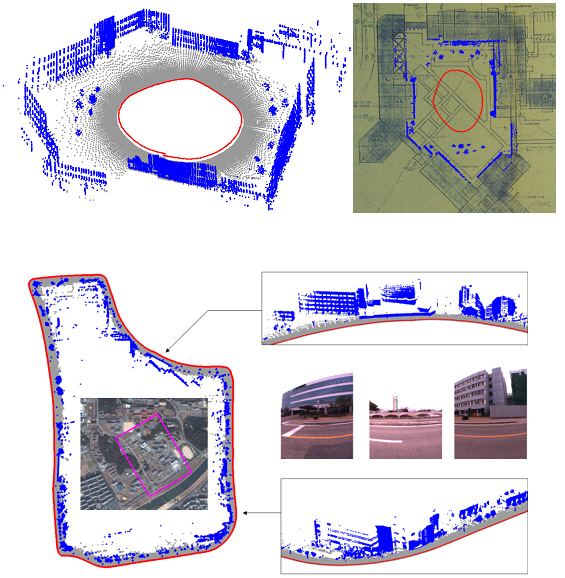
In 3) space/object recognition, ROI(Region of Interest) extraction and tracking, GRIF and contextual information based recognition, 3D object recognition using view clustering, and the unified object recognition framework are developed as an object recognition technology. For space recognition, appearance-cloning based on multiple views and probabilistic model, 3D modeling using a catadioptric camera, 3D reconstruction and modeling using internet images, infinite homography estimation, semi-metric space reconstruction, and specular component removal technology are established. Scene interpretation by multilayered context information, hierarchical map building and self-localization based on object recognition and co-segmentation of common objects in multiple images using feature transformations are also developed.
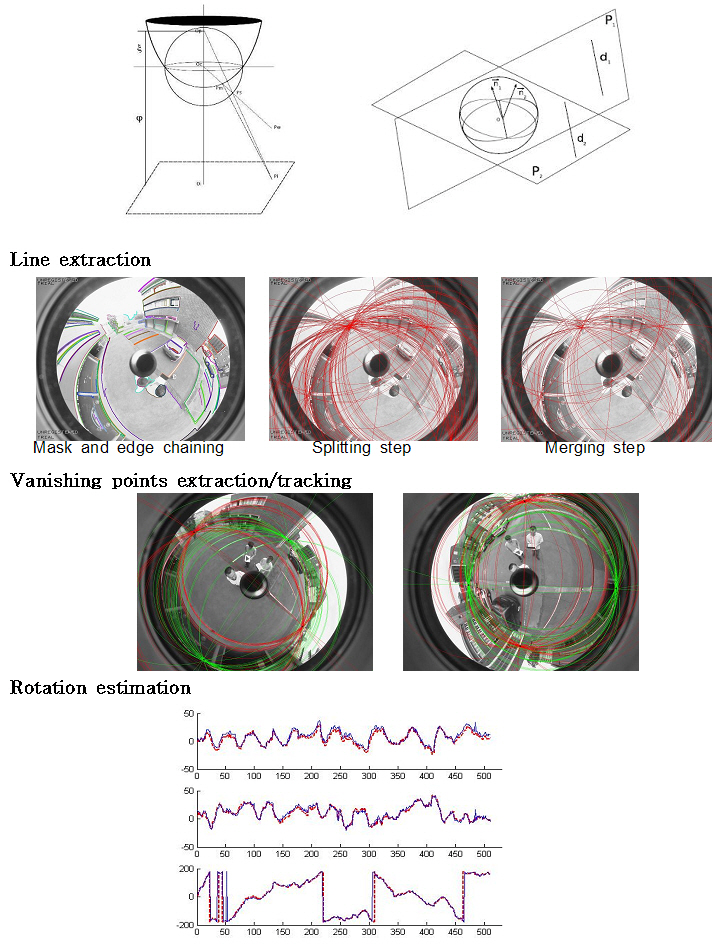
In 4) SLAM and autonomous navigation of a mobile robot, SLAM using single, stereo and catadioptric cameras, motion estimation and high-precision 3D reconstruction by camera-laser sensor fusion, autonomous navigation for mobile robot and UAV attitude estimation using catadioptric images are developed.
In 5) improvement of robustness through noise modeling and error compensation, accurate noise modeling based on new probabilistic model and robot localization error compensation are investigated for low-level and high-level vision technologies, respectively. The performance of visual correspondence search is also enhanced by resolving a point ambiguity. Low-level vision processes are implemented on a FPGA-based system and hierarchically organized feature transform is developed for 6) high-speed vision.
Based on obtained technologies, 7) integrated intelligent mobile robot platform is being developed.
V. Outstanding Achievements
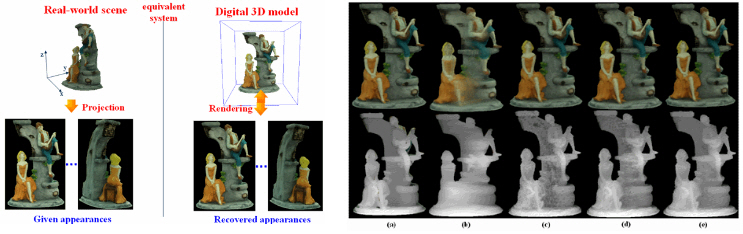
1) Appearance-Cloning: Volumetric 3D Reconstruction
2) Metric Reconstruction of the Scene and the Cameras using Images from the Internet
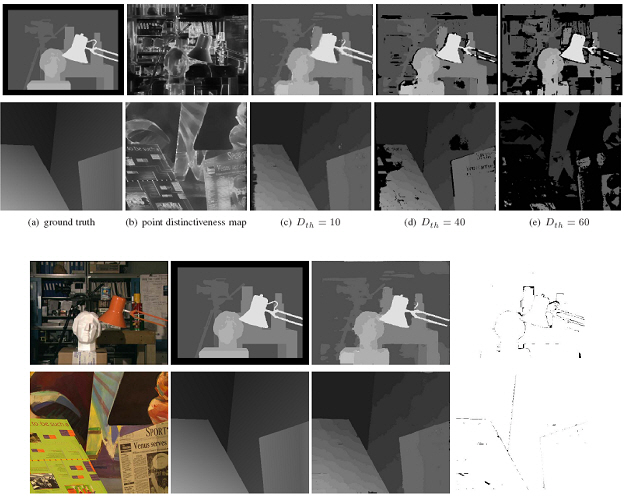
3) Distinctive Similarity Measure for Stereo Matching Under Point Ambiguity
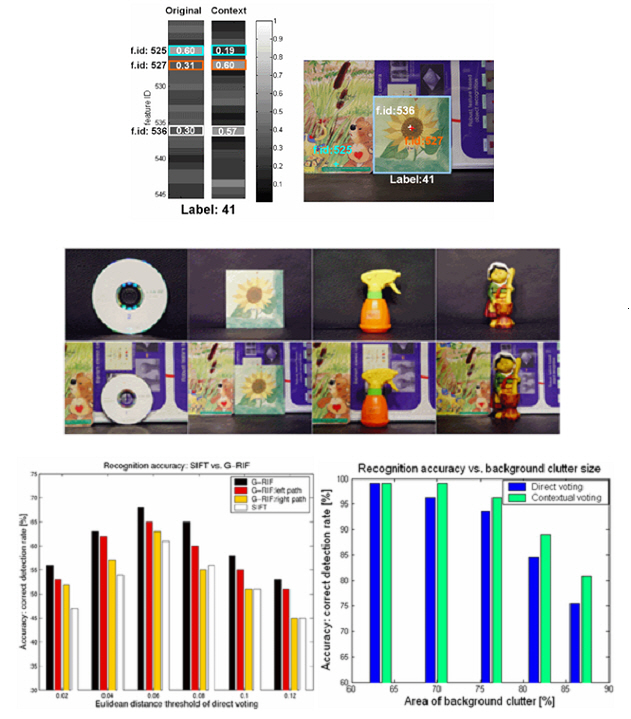
4) Object Recognition using Generalized Rovust Invariant Reature and Gestalt Law of Proximity and Similarity
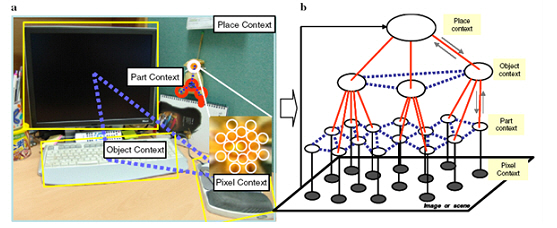
5) Robust Model-based Scene Interpretation by Multilayered Context Information
6) Single Camera Catadioptric Stereo System

7) Accurate Motion Estimation and High-Precision 3D Reconstruction by Sensor Fusion
8) Robust Feature Matching for Visual SLAM
9) UAV Attitude Estimation by Vanishing Points in Catadioptric Images
10) Physics-based Image Noise Modeling and Application
ⅤI. Expectation
Robust robot recognition technology is applicable in robot and multi-media industries as a core element. The market for intelligent robots starting with $1.5 billion in 2003 has been expected to expand more than 10 times larger. Therefore the development of robust robot recognition technology, which is the core of intelligent mobile robots, is being expected to be a highly-profitable model. Moreover, enhancing productivity through the modulization can provide a prior occupation for the global market which has a strong growth potential.
Publications
Appearance-Cloning: Photo-Consistent Scene Recovery from Multi-View Images
Howon Kim , In So Kweon
International journal of computer vision (IJCV) , February 2006
Optimal Photo Hull Recovery for the Image-based Modeling
Howon Kim , In So Kweon
The 6th Asian Conference on Computer Vision (ACCV) , January 2004
Geometric and algebraric constraints of projective concentric circles and their applications to camera calibration
Jun-sik Kim , Pirre Gurdjos , In So Kweon
IEEE Trans. on Pattern Analysis and Machine Intelligence , April 2005
A Camera Calibration Method using Concentric Circles for Vision Applications
Jun-sik Kim , Howon Kim , In So Kweon
The 5th Asian Conference on Computer Vision (ACCV) , January 2002
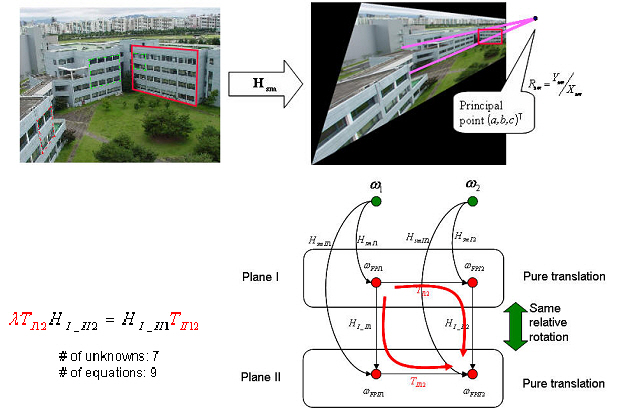
Infinite Homography Estimation Using Two Arbitrary Planar Rectangles
Jun-sik Kim , In So Kweon
Asian Conference on Computer Vision (ACCV) , January 2006
Estimating Intrinsic Parameters of Cameras using Two Arbitrary Rectangles
Jun-sik Kim , In So Kweon
International Conference on Pattern Recognition (ICPR) , August 2006
카메라 보정에 사용되는 기하제한조건에 대한 통합프레임워크 (A Unified Framework of Geometric Constraints on Camera Calibration)
Jun-sik Kim , In So Kweon
18th Workshop on Image Processing and Image Understanding(IPIU) , February 2006
Locally Adaptive Support-Weight Approach for Visual Correspondence Search
Kukjin Yoon , In So Kweon
Proceeding of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) , June 2005
Stereo Matching with Symmetric Cost Functions
Kukjin Yoon , In So Kweon
Proceeding of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) , June 2006
Adaptive Support-Weight Approach for Correspondence Search
Kukjin Yoon , In So Kweon
IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI) , April 2006
UAV Attitude Estimation by Vanishing Points in Catadioptric Images
Jean-Charles Bazin , In So Kweon , Cedric Demonceaux , Pascal Vasseur
IEEE International Conference on Robotics and Automation (ICRA’08) , May 2008
Rectangle Extraction in Catadioptric Images
Jean-Charles Bazin , In So Kweon , Cedric Demonceaux , Pascal Vasseur
(OMNIVIS ‘07) in conjunction with ICCV’07 , October 2007
Single camera catadioptric stereo system
Gijeong Jang , Sungho Kim , In So Kweon
The 6th Workshop on Omnidirectional Vision, Camera Networks and Non-classical cameras (OMNIVIS2005) , October 2005
Single-camera panoramic stereo system with single-viewpoint optics
Gijeong Jang , Sungho Kim , In So Kweon
Optics Letters , January 2006
Accurate Motion Estimation and High-Precision 3D Reconstruction by Sensor Fusion
Yunsu Bok , Youngbae Hwang , In So Kweon
Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) , April 2007
Object Recognition using Generalized Robust Invariant Feature and Gestalt Law of Proximity and Similarity
Sungho Kim , Kukjin Yoon , In So Kweon
5th IEEE Workshop on Perceptual Organization in Computer Vision (CVPRW) , June 2006
Biologically Motivated Perceptual Feature: Generalized Robust Invariant Feature
Sungho Kim , In So Kweon
Asian Conference on Computer Vision(ACCV) , January 2006
Robust Feature Matching for Loop Closing and Localization
Jungho Kim , In So Kweon
IEEE/RSJ International Conference on Robots and Systems , October 2007
|




 i3D: Interactive Full 3D Service (Foreground/Background Segme...
i3D: Interactive Full 3D Service (Foreground/Background Segme...
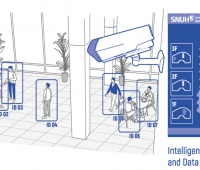
 Intelligent Robot Vision System Research Center (Detection Tr...
Intelligent Robot Vision System Research Center (Detection Tr...